自律走行ロボット(AMR)は、生産性を向上させ、安全性を強化して、メーカーに大幅なコスト削減をもたらします。こうした理由から、AMRの導入は、ほぼすべての業界に広がっていくでしょう。AMRの世界市場規模は2022年に86.5億ドルであり、2022年から2028年にかけては18.3%の年平均成長率(CAGR)で成長すると予測されています。
インダストリ5.0の背景にある考えは、ロボットは人間に取って代わるのではなく、人間が人工知能(AI)を搭載したロボットと共に働き、人間をサポートするということです。これがビジョンです。その前に、AMRはいくつかの課題を克服しなければなりません。それを克服する鍵の一つは、各種センサの搭載とセンサフュージョンという新たな分野にあります。
AMR導入が直面する課題
AMR導入における最大の課題は、運用するアプリケーションや環境の数が非常に多いことです。AMRの用途は、倉庫、農業技術、商業造園、ヘルスケア、スマートな小売、セキュリティと監視、配送、在庫管理、ピッキングと仕分けなどで、すでに特定されています。このようなさまざまな環境において、AMRは人々とともに、また人々の周りで安全に動作することが期待されます。
また、状況の複雑さにより、AMRの業務が極めて困難になることもあります。私たちが人間として当然と考えている状況の中にも、AMRでは対応が難しい場合があります。例えば、宅配ロボットが最後の荷物を配達する途中で、道の真ん中にボールがあるとします。ロボットは問題なくボールを識別し、ボールにぶつからないようにすることができます。しかし、小さな子供がボールを取りに走り出すことを予測できるほど賢いでしょうか? このような複雑な状況は数多くあります。AMRはポールに取り付けられた90度ミラーを使ってコーナーから覗き込み、交通状況を予測することができるでしょうか?AMRは流し込まれたばかりのコンクリートの上を歩けないことを知っているのでしょうか?
人間には簡単に理解できる状況でも、ロボットにとっては困難な場合があります。しかしながら、適切なセンサを使用すれば、明るい太陽を背にした物体は人よりもAMRの方が容易に検出します。しかし、流し込まれたコンクリートやこぼれた液体を特定するのは困難です。縁、崖、斜面、階段はすべてAMRにとって難関です。さらに、破壊行為など、誰かが AMR をひっくり返すような特殊な状況もあり、これが最初の脱出操作システムのきっかけとなりました。
これらの課題の多くに対処するには、最先端の大規模言語モデル(LLM)と各種高性能センサを使用したAIが必要です。
AMR向け高性能センサ
AMRで使用可能なセンサには、自己位置の推定と地図作成の同時実行(SLAM: simultaneous localization and mapping)および距離と深度の測定に必要なさまざまなタイプがあります。センサの重要な指標としては、物体検出、物体識別、色認識、解像度、消費電力、サイズ、コスト、範囲、ダイナミックレンジ、速度、多様な照明条件や天候条件で動作可能かどうかなどがあります。
AMRで使用可能なセンサ方式には、以下のものがあります。
- CMOSイメージング
- 直接飛行時間(dToF)と間接飛行時間(iTOF)深度センシング
- 超音波
- レーダー
- 誘導位置決め
- Bluetooth® Low Energy(Bluetooth LE)テクノロジー
- 慣性
上記の各センサ方式には利点とトレードオフがあります。例えば、レーダーは低照度や悪天候下でも優れた探知距離と速度を発揮しますが、色の検出が不十分で、初期コストが高く、比較的大型です(これはAMRにとって重要な考慮事項です)。LiDARは、量産CMOSシリコンファウンドリプロセスのおかげで初期コストが比較的低く、夜間や直射日光での検出には優れていますが、物体の分類には不向きです。同様に、iToF 深度センサは優れた解像度と低消費電力処理を備えています。
単一のセンサ方式では、AMR が上記のすべての課題を処理するのに必要な全情報を提供できないことは明らかです。アプリケーションと環境に応じて、AMR には複数のセンサ方式が必要になります。そして、これらのセンサは単独で動作するのではなく、センサフュージョンと呼ばれるプロセスで集合的に機能します。
自律走行ロボットを可能にするセンサフュージョン
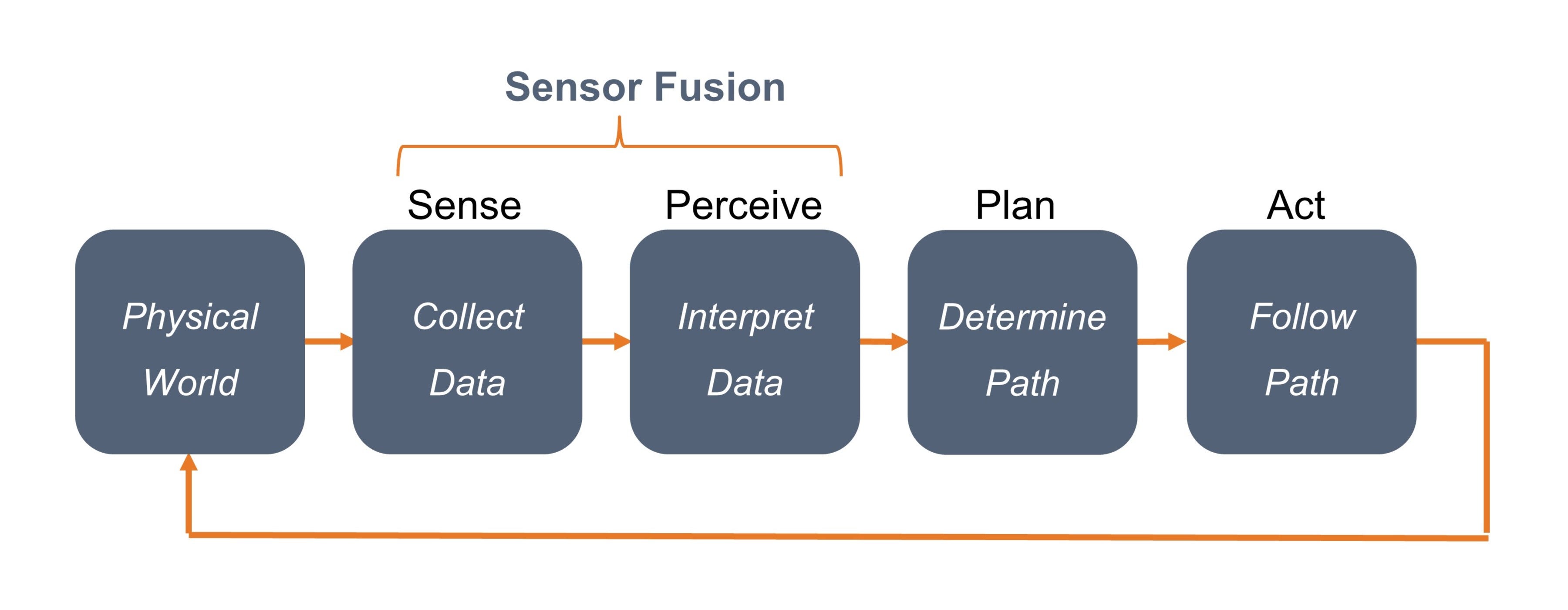
センサフュージョンとは、2つまたはそれ以上のデータソース(センサとアルゴリズムまたはモデルから、あるいはセンサ、アルゴリズム、モデルのいずれかから)を組み合わせて、システムとその周辺環境をより深く理解するためのプロセスです。AMRでのセンサフュージョンは、信頼性、冗長性、そして最終的な安全性を向上させるために不可欠です。評価は、より一貫性が高くなり、正確性が向上し、より信頼できるものになります。
以下の図1に示すように、センサフュージョンはデータ収集とデータ解釈の2つの機能を組み合わせます。
センサフュージョンの「データの解釈」ステップでは、アルゴリズムまたはモデルのいずれかの実装が必要です。センサフュージョンの結果は、自動車のバックアップのように人間が使用するために設計されることもあれば、セキュリティシステムの顔認識のように、次のステップでの機械の使用を意図して設計されることもあります。
センサフュージョンには、信号ノイズの低減など、いくつかの利点があります。非相関ノイズは同種センサフュージョンで低減でき、相関ノイズは異種センサフュージョンで低減できます。
センサフュージョンは、その本質上、冗長性を通じて信頼性を向上させます。少なくとも2つのセンサがあるため、1つのセンサからのデータが失われた場合、品質は低下しますが、他のセンサからのセンサデータは利用可能です。センサフュージョンは、物体や物体の一部がカメラから隠れるオクルージョンや、物体や表面があるカメラからの光を別のカメラに反射するリフレクションなど、未測定の状態を推定するのにも使用できます。
このような利点と導入の加速により、センサフュージョンには以下のようなトレンドが生まれています。
- AIを活用したアルゴリズムの使用
- 物体検出と分類の強化
- 協調的知覚のためのセンサフュージョン
- 複数のセンサ方式
- 悪条件下での環境認識
- 360度サラウンドビューを実現するセンサフュージョン
- リアルタイム・センサキャリブレーション
センサフュージョンの中心にあるのはセンサです。どんなに優れたアルゴリズムでも、センサから得られるデータの品質が良くなければ、質の高い結果は得られません。幸いにも、オンセミは、AMRのセンフュージョンをサポートするクラス最高のセンサおよびツールのライブラリを提供しています。
まとめ
自律走行ロボットには多くの使用事例があり、導入が加速しています。この急速な普及を支えるために、一連のベストプラクティスが登場しました。まず、AMRが遭遇する可能性のある衝突を減らすために、環境をコントロールすることが不可欠です。その一例としては、製造施設や倉庫施設で AMR/無人搬送車(AGV)用の指定されたルーチンを用意することが挙げられます。第二に、開発中にデジタルツインを使用して正確なユースケース(コーナーケースを含む)をシミュレートすることが重要です。最後に、センサフュージョンをインテリジェントセンサ、アルゴリズム、モデルと共に組み込むことが重要です。
オンセミ は、インテリジェントセンシング技術でリーダーとしての地位を確立しています。 オンセミ は、業界をリードするダイナミックレンジ性能と、ウェイク・オン・モーションのような革新的機能を備えた、ローリングシャッタおよびグローバルシャッタ両方のイメージセンサを各種提供しています。イメージセンサに加えて、オンセミは距離検出(LiDAR)用のSiPMも提供しています。このポートフォリオには、超音波センサ、誘導センサ、Bluetooth®LE技術に対応したマイクロコントローラが含まれ、位置検出に使用できるAoA(到着角)およびAoD(出発角)をサポートしています。
AMRにおけるセンサフュージョンは、インダストリ5.0に向けた産業および輸送アプリケーションに影響を与えるものであり、オンセミはそれを効果的に実現するセンサとサブシステムを提供する立場にあります。AMRソリューションおよび システムソリューションガイドもご覧ください。
その他の資料:
Steering Future Autonomous Mobile Robots On-Demand Webinar
Smart & Mobile Robot System Solution Guide
Machine Vision System Solution Guide