電気モータは、今日の産業界や日常生活で重要な役割を果たしています。家電製品から自動車、重工業用ロボットまで、さまざまな用途で、高効率でカスタマイズ性の高いブラシレスDC(BLDC)モータやACモータが使用されています。ACモータやBLDCモータは、マイクロコントローラのコストや複雑な制御アルゴリズムなどのデメリットがほとんどないため、多くのアプリケーションで好んで使用されています。このブログシリーズでは、BLDCまたはACモータのフィールド指向制御(Field Oriented Control)、FOC)から始まり、さまざまなモータ制御方式について説明します。
FOCは、電気モータを駆動する最も効率的な方法の1つです。FOCの主な目的は、ステータとロータの磁界を直交させ、最大トルクを発生させることです。そのために、3つの時変相電流を常時監視し、それぞれの相電圧を変調して時変固定子磁界の向きを正しくする方法があります。しかし、これは『言うは易く行うは難し』で、ハードウェア/ソフトウェアの要件が増えるため、実際には困難です。
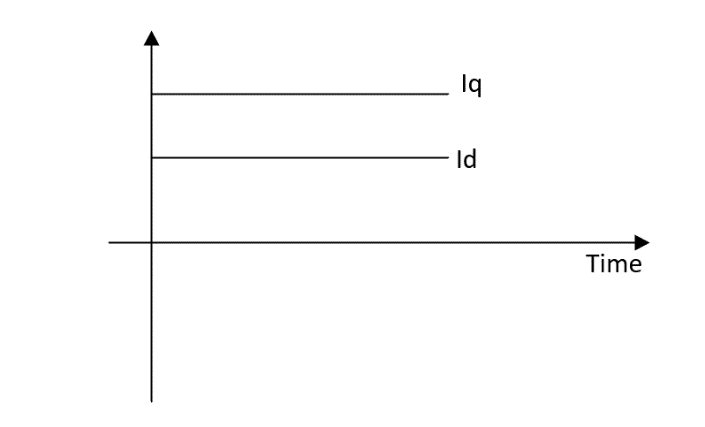
界磁指向制御では、時間的に変化する電流を監視し、静止した基準フレームに投影して、トルク成分(q軸)と界磁束成分(d軸)に分解することに変わりありません。これはクラーク変換とパーク変換によって数学的に行われ、時不変の基準フレームでトルクを直接制御するのに役立ち、制御の複雑さと必要な帯域幅を低減します。
図1:クラーク変換で3相電流(IαとIβ)を投影し、パーク変換でリニアなd、q回転基準フレームに変換する
そして、指令されたd-q軸成分を3相時変システムに逆変換し、インバータスイッチのPWM制御により3相電流を正しく変調します。
しかし、ステータとロータの磁界を直交させるためには、ロータの磁界角度を知る必要があります。これは、エンコーダやレゾルバによる位置フィードバック(センサ付き)、または測定した相電流からロータ角度を推定する逆起電力/磁束オブザーバによるソフトウェア(センサレス)で実現できます。エンコーダは一般に、インクリメンタルとアブソリュートの2つのカテゴリーに分類されます。インクリメンタルエンコーダは、相対的な角度位置と回転方向を測定できますが、ゼロ速度での絶対位置情報を提供することはできません。例えば、インクリメンタル方式の矩形波エンコーダでは、矩形波位相の2つのA/Bパルス信号が相対的な角度の動きを表し(例えば、1回転あたり1000パルス)、基準点を提供するためにZインデックス信号が追加されることもあります。A/B信号の相対位相の極性(例:AはBに遅れる、BはAに遅れる)により回転方向を示します。アブソリュートエンコーダは、様々なデジタルエンコーディングの実装により、真の角度位置を提供します。しかし、信号数と帯域幅が増加するため、コントローラに信号を送るために通信バスが必要になることが多くなります(例:16ビット位置エンコーディング)。
位相電流センシング
FOCのセンサ付き、センサレスにかかわらず、正確なトルク制御を行うためには、相電流を正確に測定する必要があります。相電流を測定する最も一般的な方法は、各ローサイドMOSFETのソースとグランド間にシャント抵抗を設け、インバータステージでローサイドセンシングを行う方法です。シャントの同相電圧が低いため、低コストの電流センスアンプを使用できます。ハイサイド(インライン)相電流センスは、一般に、コモンモード電圧がPWM周波数でほぼDC入力電圧とグランドの間で変動するため、コモンモード電圧エラーを軽減するために高価な特殊高CMRまたは絶縁アンプ回路が必要となります。
理想的には、3つの相電流をすべて同時に測定しますが、電流検出の帯域幅とソフトウェアの複雑さを犠牲にして、シャント抵抗の数を減らし、システムのコストと電力損失を減らすことが可能です。2シャント構成では、キルヒホッフの電流法則に基づき、測定された2つの電流から未測定電流を計算します(たとえば、U相とV相に流れる電流とW相から流れる電流は等しい)。シングルシャント構成では、測定した電流と実際の相電流を関連付けるために、インバータのスイッチング状態に関する知識が必要です。一般に、全相電流を求めるための測定精度は、シャント抵抗の数が3つから1つに減るごとに低下する。そのため、より高速な測定回路が必要となり、システム全体の遅延がより大きな要因になる。また、特にシングルシャント構成の場合、センシングの適切なタイミングを追ったり、測定した電流と実際の相電流との相関関係を判断するために、ソフトウェアの複雑さが増します。
図2および図3に、センサ付きおよびセンサレスFOCモータ制御システムの例を示します。
センサ付きFOC
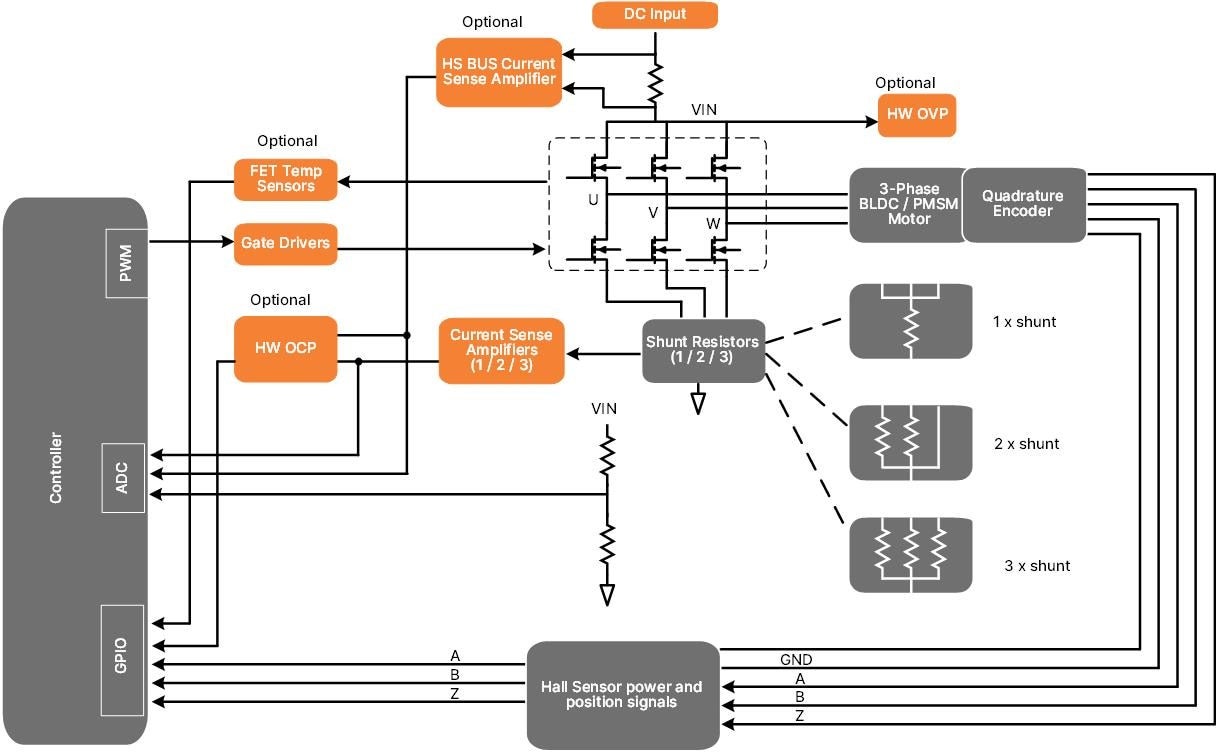
図2:センサ付きFOCモータ制御システムブロック図
図2は、矩形波エンコーダを用いたセンサ付きFOCの実装に必要な信号を示したものです。最低でも、ADCへの1-3個の電流センス入力(シャント構成による)と、矩形波A/B/Z信号用の3個のGPIOピンがフィードバックのために必要です。また、電源もエンコーダに供給する必要があります。
センサレスFOC
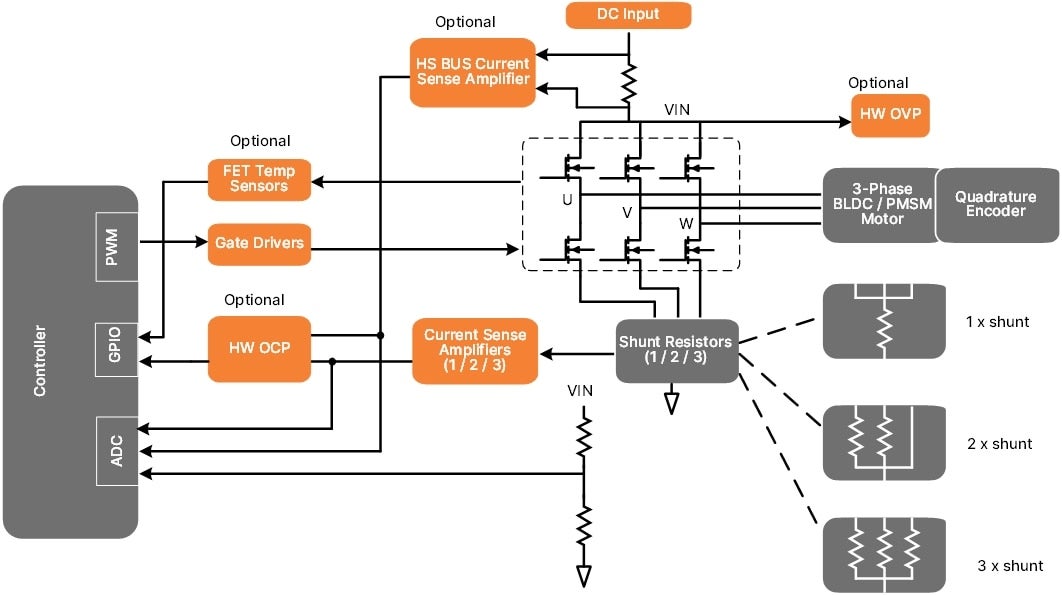
図3:センサレスFOCモータ制御システムブロック図
図3は、センサレスFOCの実装に必要な信号を示したものです。シャント構成にもよりますが、フィードバック用のADCには最低でも1~3つの電流センス入力が必要です。
オンセミ(onsemi)のモータ開発キット「STR-1KW-MDK-GEVK」と「STR-MDK-4KW-65SPM31-GEVK」は、センサ付きおよびセンサレスFOC制御を使用して、高出力モジュールを使用してモータを駆動する、2つの包括的なモータ制御ソリューションです。
保護機能
過電流保護(OCP)
FOCでは、LS電流センシングによる制御が行われているため、その信号をOCPに利用することも可能です。ただし、前述の通り、ローサイド電流センシングでは、インバータ段とモータの故障しか検出できません。電源の下流にある他の故障から保護するために、HSバス電流検出回路を追加で実装できます。
ハードウェア、ソフトウェア、またはその両方で OCP を実現できます。一般に、ハードウェアによるOCPの方が応答が速いですが、ソフトウェアによるOCPの方がより柔軟です。ADC のフルスケール電流測定範囲は、ソフトウェアベースの OCP の最大トリガポイントを制限します。ハードウェアとソフトウェアを組み合わせた実装は、壊滅的なハード障害を素早く軽減するためにラッチ式 OCP を実装でき、ソフトウェアベースの OCP はサイクルごとの位相電流制限のようなダイナミックイベントを制御することができます。
過電圧保護(OVP)
回生ブレーキによりDCバスに過大な高電圧がかかるような特殊なアプリケーションでは、ダイオードクランプやクローバ回路によるHW OVPの実装が必要な場合があります。また、DCバスを監視し、モータの定格電圧を超える電圧からモータを保護するために、インバータ出力をディセーブルするソフトウェアベースのOVPを実装することも可能です。
過熱保護(OTP)
インバータのMOSFETや基板の温度を監視することは、一般的にすべての制御方法において有効です。特に、システムが周囲温度の変化にさらされる場合や、冷却システムの故障の場合には、注意が必要です。例えば、PWMのデューティサイクルの制限は、温度の上昇に応じて動的に減少させることができ、また、温度監視は部品の経時劣化を判断するのに役立ちます。
MOSFET ゲートドライバ
インバータ用MOSFETのゲートドライバの選定は、モータ制御システムにとって重要であり、システム要件に合わせた明確な設定が必要です。ゲートドライバの選定を誤ると、性能の大幅な低下やシステムの致命的な故障につながる可能性があります。
単相のHS-LS MOSFETゲートドライバは、オンセミの「NCP51530」や「FAN73933」など、インバータ1相(合計3相)に使用できるものが多数あります。しかし、3相モータ制御には、オンセミの「FAN7388」、「FAN73896」、「FAN7888」などの専用集積3相ゲートドライバを使用する選択肢もあります。一般に、3つの単相ゲートドライバは、各相へのカップリングが密であるため、統合3相ソリューションよりも優れた基本性能を提供します。しかし、統合3相ドライバは、通常、モータ制御アプリケーションで一般的な補助機能を実装し、ハードウェアの複雑さ、部品点数、基板サイズを削減します。また、一部のゲートドライバは、自動コンプリメンタリ・ゲートドライブ出力とデッドタイム挿入機能を備えており、1つのPWM出力(コントローラからの必要PWM信号を6から3に削減)で各インバータ相を制御できるようになっています。ただし、この機能はPWM方式によっては適切でない場合があります。
基本的な保護技術と組み合わせることで、FOCは電気モータを駆動する最も効率的な方法の1つとなり、さまざまなアプリケーションで、モータの制御と精度を向上させる素晴らしい方法となります。
オンセミの最新のモータ開発キットで、効率的で信頼性の高いモータ駆動システムの開発をいかに簡素化するか、その詳細をリンク先でご覧ください。